64
64


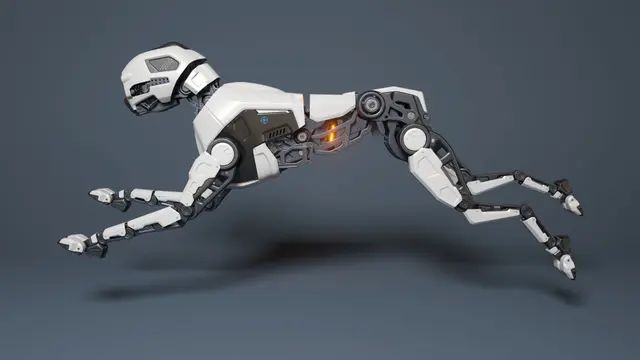
Китайські вчені з Харбінського технологічного інституту створили роботизованого пса зі штучним інтелектом, здатного пересуватися на нерівних поверхнях астероїдів у низькій гравітації. Робот використовує підхід «навчання з підкріпленням» і не потребує важкого стабілізаційного обладнання, інформує Interesting Engineering.
Робот оснащений «безмодельною» системою управління, що дозволяє йому синхронно рухати всіма чотирма лапами. Завдяки цьому він може виправляти нахили, змінювати орієнтацію в польоті та адаптувати траєкторію під час приземлення. Такий підхід значно спрощує пересування в умовах слабкої гравітації, відкриваючи нові можливості для дослідження малих небесних тіл.
Одним із головних викликів при роботизованих дослідженнях астероїдів є нестача тяги для традиційних колісних роверів через мінімальну силу тяжіння, яка часто становить лише тисячні від земної. Новий робот здатен розв’язати цю проблему завдяки здатності стабілізувати свої стрибки та м’яко приземлятися. Дослідники також розробили платформу симуляції мікрогравітації, щоб випробувати алгоритми управління і гарантувати безпечну посадку та корекцію положення.
Робота навчили підтримувати баланс під час стрибків за допомогою навчання з підкріпленням у віртуальній симуляції. Протягом семи годин робот удосконалював рухи для стабільного приземлення та виправлення крену, тангажу й курсу. Наприклад, при запуску під кутом нахилу 140 градусів робот стабілізувався за вісім секунд і зміг змінити орієнтацію на 90 градусів у польоті.
Вчені зазначають, що успішна робота подібних роботів може стати революційною у вивченні астероїдів. Це дозволить проводити довгострокові дослідження поверхонь цих космічних об’єктів і підвищити ефективність використання космічних ресурсів.
Китайські вчені з Харбінського технологічного інституту створили роботизованого пса зі штучним інтелектом, здатного пересуватися на нерівних поверхнях астероїдів у низькій гравітації. Робот використовує підхід «навчання з підкріпленням» і не потребує важкого стабілізаційного обладнання, інформує Interesting Engineering.
Робот оснащений «безмодельною» системою управління, що дозволяє йому синхронно рухати всіма чотирма лапами. Завдяки цьому він може виправляти нахили, змінювати орієнтацію в польоті та адаптувати траєкторію під час приземлення. Такий підхід значно спрощує пересування в умовах слабкої гравітації, відкриваючи нові можливості для дослідження малих небесних тіл.
Одним із головних викликів при роботизованих дослідженнях астероїдів є нестача тяги для традиційних колісних роверів через мінімальну силу тяжіння, яка часто становить лише тисячні від земної. Новий робот здатен розв’язати цю проблему завдяки здатності стабілізувати свої стрибки та м’яко приземлятися. Дослідники також розробили платформу симуляції мікрогравітації, щоб випробувати алгоритми управління і гарантувати безпечну посадку та корекцію положення.
Робота навчили підтримувати баланс під час стрибків за допомогою навчання з підкріпленням у віртуальній симуляції. Протягом семи годин робот удосконалював рухи для стабільного приземлення та виправлення крену, тангажу й курсу. Наприклад, при запуску під кутом нахилу 140 градусів робот стабілізувався за вісім секунд і зміг змінити орієнтацію на 90 градусів у польоті.
Вчені зазначають, що успішна робота подібних роботів може стати революційною у вивченні астероїдів. Це дозволить проводити довгострокові дослідження поверхонь цих космічних об’єктів і підвищити ефективність використання космічних ресурсів.