 1096
1096

Кілька місяців тому на новорічному шоу в Китаї два десятки гуманоїдних роботів виконали паркур і бойові мистецтва разом із дітьми — живцем, перед сотнями мільйонів глядачів. За рік до того ті самі роботи незграбно крутили хустинками. Цей стрибок приголомшив навіть фахівців. А за лаштунками цього видовища — алгоритми, що навчають роботів рухатись так, як рухаються люди: не по заздалегідь написаній програмі, а адаптуючись до реального світу в реальному часі. Дослідження, опубліковане на arXiv у лютому 2026 року командою вчених з MIT, ETH Zurich та інших установ, задокументувало саме такий прорив — і пояснило, чому він означає набагато більше, ніж ефектне відео.
Що відомо коротко
- Що розроблено: система Perceptive Humanoid Parkour (PHP) — модульний фреймворк для автономного паркуру гуманоїдних роботів
- Хто розробляв: міжнародна дослідницька команда, афільована з MIT, ETH Zurich та іншими установами
- Де опубліковано: препринт arXiv (лютий 2026), висвітлено TechXplore
- На якому роботі тестували: Unitree G1 — гуманоїдний робот ростом 1.3 м
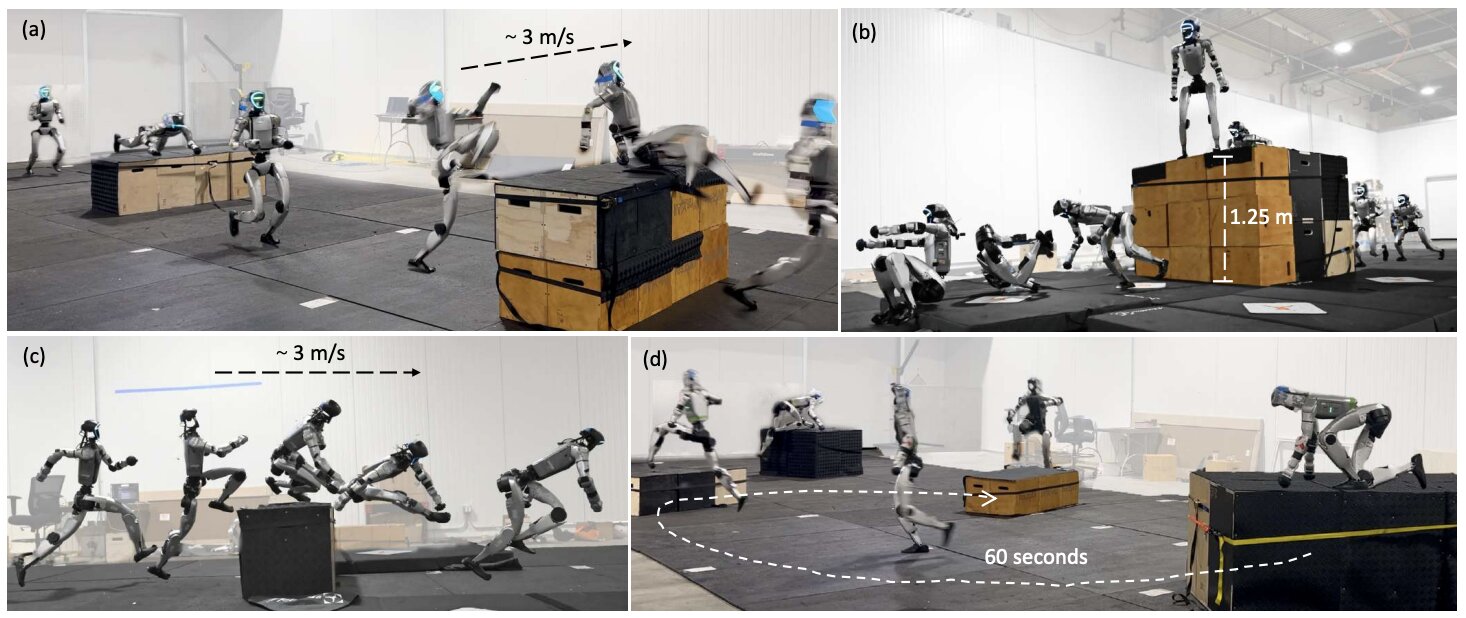
- Ключові результати: робот самостійно долає стіни висотою до 1.25 м (96% власного зросту), виконує безперервний 60-секундний паркур-курс, вибирає тактику в режимі реального часу, використовуючи лише вбудовану глибинну камеру
- Головний висновок: поєднання людських рухових даних і навчання з підкріпленням дозволяє роботам досягати гнучкості, недосяжної для традиційних запрограмованих систем
Проблема: навіщо роботам паркур?
На перший погляд, паркур для роботів виглядає як наукова розвага: навіщо машині стрибати через перешкоди, якщо можна просто обійти?
Але паркур — це не самоціль. Це граничний тест на фізичну адаптивність. Якщо робот здатний у частки секунди зробити вибір — перестрибнути, підлізти, перекотитись, заскочити — і виконати це без падіння в незнайомому середовищі, то він готовий до реального промислового чи рятувального завдання. Аварійна станція, зруйнована будівля, захаращений склад — це теж «перешкодний курс», тільки без попередження і без репетиції.
До недавнього часу навіть найкращі роботи вміли або виконувати один конкретний трюк дуже добре, або ходити по рівній поверхні більш-менш впевнено. Поєднати десятки складних навичок у єдину гнучку систему, що сама обирає потрібну — ось де досі була стіна.
Як це працює: три рівні PHP
Система Perceptive Humanoid Parkour (PHP) вирішує цю проблему через три взаємопов’язані рівні.
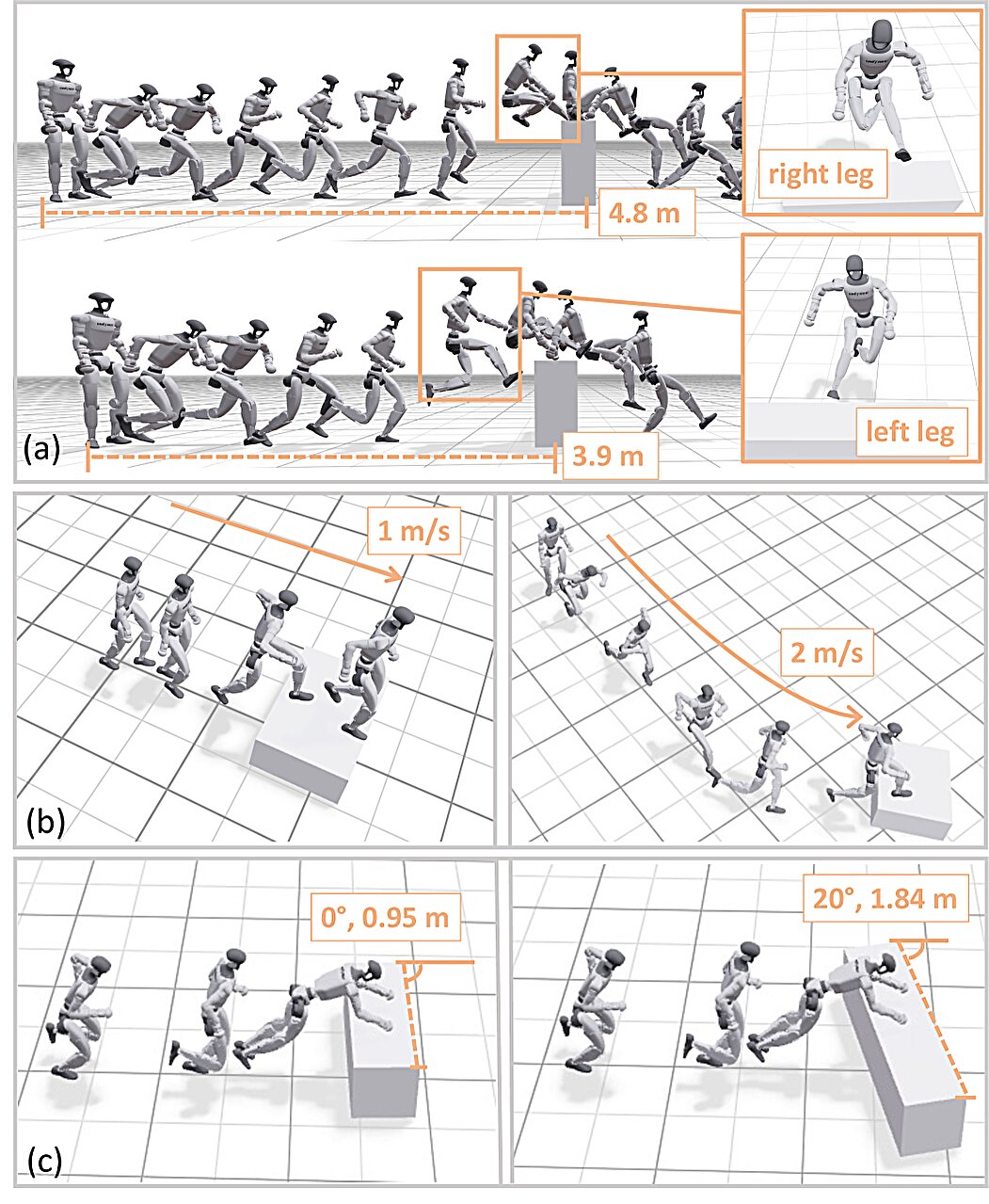
Перший рівень — бібліотека людських рухів. Дослідники використали захоплення руху справжніх людей-паркурщиків і сформували бібліотеку «атомарних навичок» — стрибок, перекат, підйом, перекидання через перешкоду тощо. За допомогою motion matching — пошуку найближчого сусіда у просторі ознак — система може компонувати ці рухи у довільні послідовності, зберігаючи плавність і природність переходів між ними.
Другий рівень — навчання з підкріпленням. Для кожної навички тренується окрема RL-політика на «вчителя» з привілейованою інформацією (точна карта середовища, яку у реальному світі не отримаєш). Потім всі навички дистилюються в єдину «учнівську» політику, що працює лише на основі вбудованої глибинної камери. Цей підхід — teacher-student distillation — дозволяє уникнути більшості помилок накопичення, що зазвичай руйнують складні паркур-послідовності.
Третій рівень — перцептивна автономія. Робот бачить перешкоду через глибинну камеру і самостійно вирішує: переступити, залізти, перекотитись або перескочити. Жодних команд від оператора — лише загальний напрямок руху і числова команда швидкості. Вся тактика — власна.
Що вміє Unitree G1: цифри з реальних тестів
На відміну від більшості робототехнічних досліджень, що залишаються у симуляції, команда PHP провела масштабні випробування на фізичному роботі. Результати:
Кіт-волт і дешволт (перекочування через перешкоду з ударом по ній і запресом через) виконуються на швидкості близько 3 м/с.
Підйом на стіну заввишки 1.25 м — це 96% зросту Unitree G1. Людина-паркурщик, що долає стіну власного зросту, вважається компетентним практиком. Робот робить це без жодної попередньої розмітки чи «знання» місця.
60-секундний безперервний курс — множинні перешкоди різної висоти та геометрії, що вимагає автономного вибору стратегії на кожному кроці.
Адаптація в режимі реального часу: якщо перешкоду зсувають просто під час руху робота — він коригує план і продовжує рух, не зупиняючись.
Sim-to-real: головна пастка і як її подолали
Будь-який дослідник у робототехніці знає про проблему sim-to-real: в симуляції все виглядає ідеально, а у фізичному світі алгоритм розсипається через шум, тертя, люфти в шарнірах і сотні інших дрібниць, яких симулятор не відтворює.
PHP долає цю прірву кількома способами. По-перше, учнівська політика тренується не на ідеальних даних вчителя, а зокрема додатково з RL-об’єктивом на реальних завданнях — це коригує накопичені помилки імітації. По-друге, завдяки тому що вся система покладається лише на глибинну камеру і пропріоцепцію (внутрішні датчики стану робота), вона не залежить від точної геометрії середовища, яку неможливо заздалегідь відтворити у симуляторі.
Результат — zero-shot sim-to-real трансфер: не потрібно дооптимізовувати алгоритм після переходу до фізичного робота. Він просто працює.
Контекст: де зараз знаходиться галузь
Для розуміння масштабу досягнення — кілька порівнянь.
Раніше Boston Dynamics Atlas демонстрував паркур, але це була жорстко відпрацьована хореографія конкретного маршруту. Нова архітектура PHP принципово інша: маршруту наперед немає, є лише перешкоди і рішення в реальному часі.
На Гала китайського Нового року 2026, що зібрала сотні мільйонів глядачів, роботи Unitree H1 і G1 виконали у прямому ефірі перший у світі безперервний паркур через стіл, стрибок з висотою польоту понад 3 метри і Airflare-кружіння в 7,5 обертів. Рік до того ті самі роботи ледве координували рухи з хустинками. Прогрес за один рік — разючий.
Паралельно вчені з Georgia Tech розробили алгоритм відновлення рівноваги, який підвищує стійкість двоногих роботів на 81% на непередбачуваному рельєфі — ще один шматочок пазлу до повноцінної автономної locomotion.
Цікаві факти
- Unitree G1 коштує близько $16 000 — рекордно дешево для повнорозмірного гуманоїдного робота. Для порівняння, Atlas від Boston Dynamics оцінюється у сотні тисяч доларів.
- Motion matching — той самий алгоритм, що використовується у відеоіграх для плавної анімації персонажів. Тепер він керує реальним залізом у реальному світі.
- Teacher-student distillation — концепція, де складна «розумна» мережа навчає простішу, яку потім розгортають на пристрої. Той самий підхід використовується для стиснення великих мовних моделей у мобільні застосунки.
- Пропріоцепція у роботів — аналог м’язового відчуття у людини: датчики кута та крутного моменту у кожному суглобі, що дозволяють «відчувати» власне тіло навіть без камери.
- Ринок гуманоїдних роботів оцінюється у $13–22 млрд до 2032 року при щорічному зростанні понад 38%. Китай контролює 70% ланцюга постачання компонентів.
- Навчання з підкріпленням — та сама технологія, що навчила AlphaGo перемагати у го. Тепер вона навчає тіла, а не тільки уми.
Що це означає
Описаний прорив має наслідки далеко за межами лабораторії.
Для промисловості: робот, що вміє адаптуватись до непередбачуваного середовища, відкриває двері на ринки, де сьогодні немає автоматизації: будівництво, аварійні роботи, сільське господарство зі складним рельєфом. Прогнози показують, що до 2028–2029 року гуманоїдні роботи загального призначення стануть комерційно доступними.
Для безпеки: якщо наступного року ці роботи підуть на заводи і в логістичні центри, питання безпеки поруч із людьми стає критичним. Паралельні роботи над алгоритмами відновлення рівноваги і самозахисту від падінь — не розкіш, а необхідність.
Для суспільства: питання про те, чи справді ми хочемо такого майбутнього — і яке місце в ньому залишається для людини — ставиться все гострішими. «Хрещена мати ШІ» Фей-Фей Лі нагадує: розвиток технологій має ґрунтуватись на науці і практичності, а не на фантастичних страхах чи сліпому захваті.
Для розуміння інтелекту: навчання на основі людських рухів — це не просто інженерне рішення. Воно ставить глибоке питання: наскільки близько машина підходить до рівня загального інтелекту, якщо вона вже освоїла одну з найскладніших фізичних дисциплін людини — і робить це без жодного попереднього сценарію?
FAQ
Чим PHP відрізняється від попередніх систем паркуру для роботів? Попередні системи або оптимізували конкретний маршрут, або вимагали великого обсягу рухових референсів. PHP поєднує бібліотеку людських рухів з навчанням з підкріпленням і дозволяє роботу автономно вибирати тактику на основі лише глибинної камери — без заздалегідь заданого плану.
Що таке sim-to-real трансфер і чому це важливо? Sim-to-real — це здатність алгоритму, натренованого у комп’ютерній симуляції, одразу працювати на фізичному роботі без доналаштування. Це головна практична перешкода у робототехніці: реальний світ завжди має тертя, шум і непередбачуваність, яких симулятор не відтворює точно.
Чи може такий робот використовуватись у небезпечних місіях? Теоретично — так. Саме для цього і розвивається ця технологія: аварійно-рятувальні операції, огляд небезпечних об’єктів, робота у зонах лих. Але до реального розгортання потрібні додаткові випробування на надійність і безпеку поруч із людьми.
Що таке Unitree G1 і чому його обрали для цього дослідження? Unitree G1 — повнорозмірний гуманоїдний робот китайської компанії Unitree Robotics вартістю близько $16 000, один з найдоступніших на ринку. Його відносно низька ціна і відкрита архітектура роблять його популярним для академічних досліджень у галузі рухової автономії.
У 1968 році Стенлі Кубрик показав нам моноліт, що навчає людиноподібних істот використовувати знаряддя. У 2026-му дослідники показали щось схоже — але навпаки: людина навчає машину рухатись по-людськи. І машина засвоює урок.
Гуманоїдний робот, що вибирає тактику долання стіни в частки секунди, використовуючи лише власні очі і тіло — це не розвага і не шоу. Це перший переконливий доказ того, що автономна фізична інтелігентність стає реальністю.
Питання більше не в тому, чи зможуть роботи рухатись як люди. Вони вже можуть. Питання — що ми будемо з цим робити.
Джерела: препринт arXiv 2602.15827 «Perceptive Humanoid Parkour: Chaining Dynamic Human Skills via Motion Matching» (лютий 2026); TechXplore; TechXplore; Interesting Engineering; Al Jazeera.
Гуманоїдний робот навчився паркуру по-людськи з’явилася спочатку на Цікавості.





